![<?echo $_SERVER['SERVER_NAME'];?>](/template/twentyseventeen/skin/images/header.jpg)
Application overview
The design of the motor control system is a multidisciplinary issue involving mechanical, electrical and control systems. OPTIMUS explores the design space and automatically improves the design without the need for user intervention through its powerful optimization algorithms. This application case demonstrates how OPTIMUS integrates with Simulink to optimize the output torque ripple and switching losses of the motor by modifying (a) the motor's pole width (b) excitation signal.
Design problem
The model of the control system is built in Simulink. The electromagnetic field corresponding to the different pole widths of the motor has been calculated in ANSYS, and the coil inductance is introduced as a result into the Simulink model. The inverter circuit is modeled in PSpice and then converted to a Simulink-compatible module via the SLPS interface, thereby completing the integration.
Software tools used
• OPTIMUS and its Matlab/Simulink interface • Simulink
• PSpice (SLPS interface)
• ANSYS
The simulation process integrates simulation programs, their workflows, and input and output files with the OPTIMUS workflow OPTIMUS graphical user interface. Through the interface between OPTIMUS and Matlab/Simulink, OPTIMUS conveniently parameterizes the input file of the simulation and parses out the required output parameters from the output file (Figure 1).
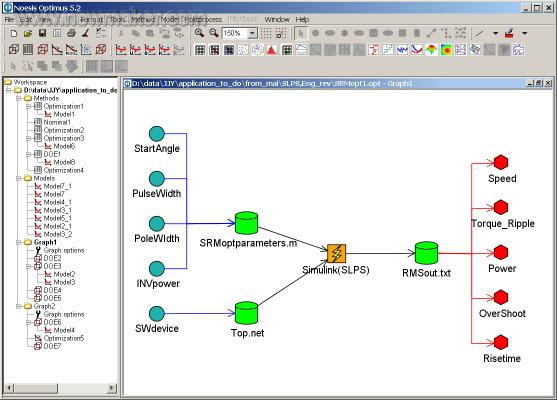
Figure 1 – OPTIMUS Workflow for Motor Control System Simulation
model
The motor in the case is a 3-phase energized, 6-pole stator, 4-pole rotor switched reluctance motor (SRM). The control system simulation was built in Simulink, the motor electromagnetic field was calculated in ANSYS, and the inverter circuit was modeled in PSpice. (figure 2)
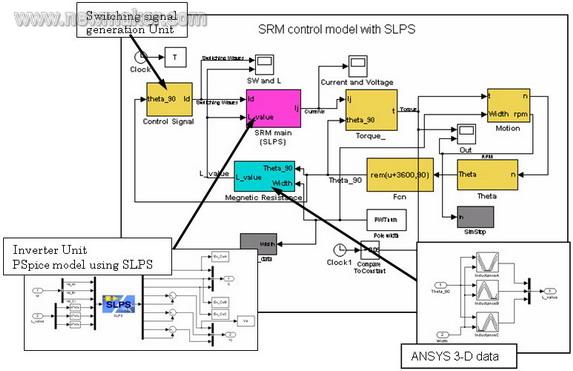
Figure 2 – Simulink model of the motor control system
The three design parameters are the motor pole width, the starting angle of the excitation signal, and the width of the excitation signal. The optimization goal is to minimize the ripple of the motor output torque. The constraint is that the motor speed is greater than 1000 RPM.
Method application
Experimental design and response surface model
The Design of Experiment (DOE) method and the Response Surface Model (RSM) were used to explore the design space. In this case, the Latin hypercube method of 100 sample points was applied. Based on this, a least squares response surface based on Taylor polynomial is established to fit the experimental design sample points.
Design Optimization
In this case, OPTIMUS applied the Adaptive Evolution (SAE) genetic algorithm to find the smallest motor output torque ripple by solving on the response surface, while also satisfying the motor speed of not less than 1000 RPM. The optimal solution found on the response surface is used as the starting point in the subsequent local optimization process of the simulation workflow. In this way, through the combination of several optimization algorithms and different solution methods, the global optimal design can be found at the same time, and the optimization process time is shortened.
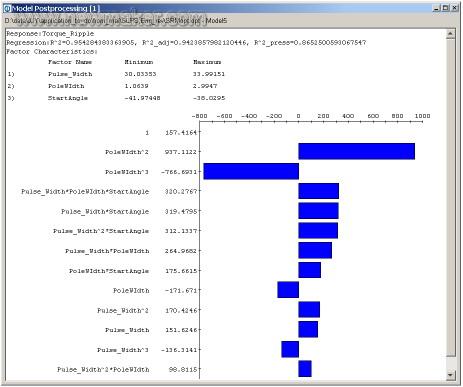
Figure 3 – Contribution graph showing the motor pole width and excitation signal starting angle are the design parameters that have the greatest impact on the output torque ripple.
Result description
Experimental design and response surface model
The Latin hypercube test design method was run to create the most appropriate sample. Figure 4 shows that the motor pole width and excitation signal width are important design parameters that have a large effect on the output torque ripple. This response surface model is an approximation of the simulation model. In the optimization process, if you need to solve a large number of simulation models continuously, you will need a considerable amount of calculation. Proper use of the response surface model can effectively reduce the amount of calculation and improve the efficiency of the optimization process. The quality of the response surface model (and its reliability for the optimization process) can be confirmed by the regression coefficients obtained during the establishment process.
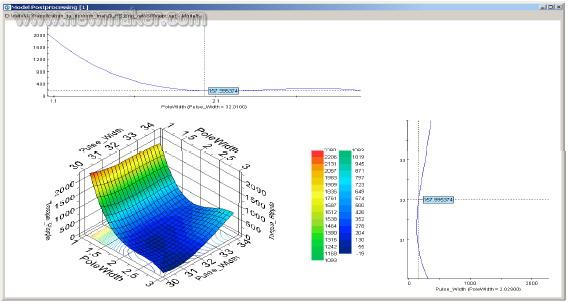
Figure 4 – OPTIMUS setup response surface shows the relationship between the output torque ripple and the selected input parameters
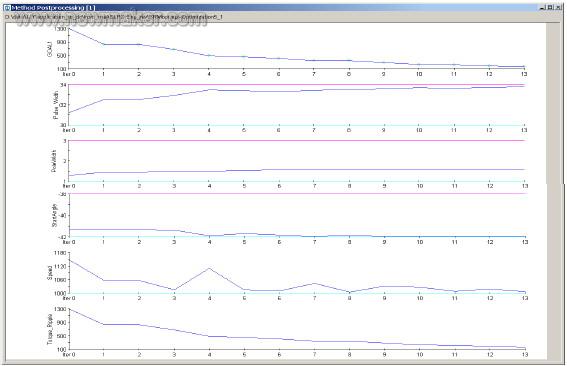
Figure 5 – Convergence of the optimization objective function: Minimize the output torque ripple

Figure 6 – Output Torque and Speed ​​of the Motor Before and After Optimization
in conclusion
OPTIMUS successfully automates the Simulink simulation and finds the optimum pole width, the starting angle and width of the excitation signal, so that the output torque ripple of the motor is effectively reduced and the motor speed is always higher than the specified speed.
income
• Automate existing simulation processes • Free engineers from repetitive work • Design space exploration and powerful optimization methods help find the optimal design and meet constraints.
24 port Fiber patch panel is designed for the protective connection between cables and pigtails; 24 Port Patch Panel is suitable for fiber splicing, storage and protection. 2U Fiber Patch Panel Pre-terminated fiber to reduce installation time and ensure accuracy.Fiber optic patch panel 24 port protective outer jacket, which can easily be removed for tighter spaces.Fo patch panel 24 port Patch panels can be loaded with adapters, splice cassettes tray and pigtails Foclink 24port fiber patch panel price is well .
24 Port Fiber Patch Panel,24 Port Patch Panel,24 Patch Panel,Fiber Patch Panel 24 Port
Foclink Co., Ltd , http://www.scfiberpigtail.com