![<?echo $_SERVER['SERVER_NAME'];?>](/template/twentyseventeen/skin/images/header.jpg)
Visual navigation, also known as image recognition navigation, is divided into two ways: one is wired and the other is wireless. The wireless visual navigation technology utilizes the CCD to take corresponding image data of the surrounding environment when the system is dynamic, and compares it with the set running path in the information database, thereby determining the current location of the AGV, and then passing the control module to the trolley. The running path makes real-time decisions. The first type of wired visual navigation technology is based on the specific ground or roadside obvious road signs of the AGV site. The image of the roadside is dynamically acquired by the on-board camera (CCD), and then processed by the on-board computer to identify The corresponding identification line of the path is determined, and the distance between the AGV and the desired identification line and the angle with the identification line are judged, and then the actual driving path of the AGV is controlled by the driving system to be within the allowable range with the desired path.
The advantages of wired visual navigation technology are: it can acquire large-capacity information, the setting and change of specific path is relatively simple, the system has better flexibility, etc., and it has the feasibility of practical application and broad prospects. It is the current AGV. Advanced navigation technology and important development directions.
The vehicle-mounted camera device is mainly composed of a CCD camera, an image acquisition card, a light source and the like. The schematic diagram of the camera to collect information is shown in the following figure:

Camera acquisition circuit diagram
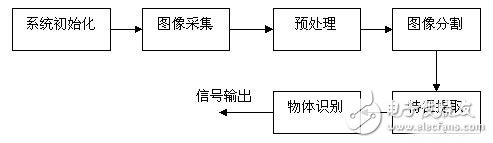
After the vision system is started, the AGV's on-board CCD camera performs corresponding image acquisition on the path in front of the car. After the image acquisition card, it is processed and sent to the corresponding upper computer. The upper computer of AGV performs appropriate image processing on the ground information (mainly including threshold processing, mask, histogram analysis, image segmentation, edge detection, region growth) and image analysis (mainly including feature ingestion, object recognition, position size). And direction and analysis of other physical features of the image and deeper information processing), and then form corresponding control commands, which are then transmitted to the on-board computer (single-chip microcomputer) to control the corresponding actions of the AGV. Schematic diagram of the working principle of the vision system:
Car camera connected to the power supply notes
After the engine is started, the output voltage is greatly disturbed. The power supply to the backup lamp is not pure DC power supply, but a pulse signal is superimposed on it. If there is a condition that can be tested by an oscilloscope, it will be a signal similar to a square wave. If the reversing surveillance camera does not have a filter (also called a rectifier), the camera power supply line is directly on the reversing light, because the working voltage is extremely unstable, the camera does not work properly, the gear position is switched through the reverse gear, then the camera A short voltage pulse is added. This sudden voltage pulse is not conducive to sensitive circuitry in the camera and may shorten its life.
Since the car camera needs 12V power supply, and the power supply voltage of the car camera is too high, it is easy to make the car camera hair hot. Although the signal quality will be improved in a short time, the quality of the CCD output signal will be degraded for a long time, and the power supply voltage of the car camera will be too low. Signal quality is reduced. In order to ensure the normal power supply of the camera, the 12V circuit is more complicated and takes up more space on the board.
When reversing, when the reverse gear is engaged, the display can be automatically turned on and the rear image is clearly displayed. No additional operation is required, and the automatic program is convenient and quick.
Edit Comment: This article briefly introduces the design of the car camera circuit. The camera runs reliably. When reversing, it can not only display the rear panoramic view in real time, but also accurately measure the distance between the car and the obstacle behind the car, basically meeting the design requirements. .

Product categories of E-Scooter Battery, we are specialized in manufacturers from China, E-Scooter Battery Supplier suppliers/factory, wholesale high-quality products of manufacturing, we have the perfect after-sales service and technical support. Look forward to your cooperation!
E-Scooter Battery
E Scooter Battery,Customized Lithium Battery,24V 20Ah For E Bike,Ebike And Escooter Battery
Changxing Deli Technology Co., Ltd. , https://www.delipowers.com