![<?echo $_SERVER['SERVER_NAME'];?>](/template/twentyseventeen/skin/images/header.jpg)
Since the 20th century, with the continuous development of electronic technology and the continuous understanding of human beings, the research of robots has been deepening. At this stage, we can make robots that look close to humans, and walk close to human robots... But these are very frontier fields. The research threshold is high, and the actual commercial use is not very wide, so most of them stay in the sample stage and enter the market. Very few. With the tide of the Internet and smartphones, embedded processors are doing what the previous desktop processors can't do, so the robots are redefined at this stage. In the current consumer arena, some products equipped with intelligent processors and Internet-enabled products have also become robots. Here are some examples of mature products:
The following picture shows the products of two robots produced by domestic manufacturers. It belongs to the category of life tools. It is usually placed at home and cannot be moved by itself. It adopts embedded processor, with camera, wireless network module and display module, which can be connected to mobile phones. The mobile APP provides relevant settings for the robot, and the images captured by the robot camera can also be transmitted to the mobile phone in real time, or can be voiced with the mobile phone. The robot also has a speech recognition module. If you can ask it "What's the weather tomorrow," he will get weather information from the network and answer you. These robots placed in the home can also realize the function of safety monitoring. It is a point to view the monitoring images in the home through the mobile phone in real time. It can also adapt various sensors, such as accelerometers attached behind the doors and windows. When the doors and windows are actuated, the sensors are given to the robots. When the signal is sent, the robot then gives an alarm by setting it.
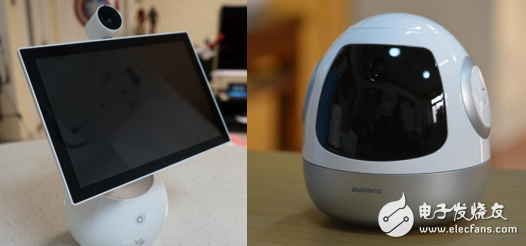
The picture below shows two foreign-produced robots. The most important feature is that they can move and belong to the category of smart toys. They can all be connected to a smartphone, set up the robot through the mobile phone, and then use the mobile phone as the operating lever of the robot, and operate the robot to make various sports for entertainment purposes. The camera is mounted on the machine, and can also be seen on the mobile phone. The video captured by the robot camera. There are also some innovations in the gameplay. For example, the robot on the left has a prototype in the Star Wars movie. The camera is aimed at the robot by the camera of the mobile phone. Through the AR technology on the mobile phone side, various effects can be added to the mobile phone screen to increase the entertainment.

There are also some special-purpose robots, such as sweeping robots, which clean the ground according to the internal path algorithm. At the same time, they can automatically avoid obstacles and automatically return to the charging pile when they are out of power.
The trend of serving robots in the future will be the epitome of these robots listed above, that is, the development of software intelligence and mechanical movement. Software intelligence enables technologies such as video processing, network connectivity and voice recognition through high-performance embedded processors. In terms of mechanical motion, the first step is to use the single-chip microcomputer and the stepping motor to realize the movement through the rolling of the wheel. Through the increase of the mechanical parts and the improvement of the algorithm, the limbs of the animal and even the human body are gradually realized. The block diagram below lists the possible techniques needed to implement such a robot:
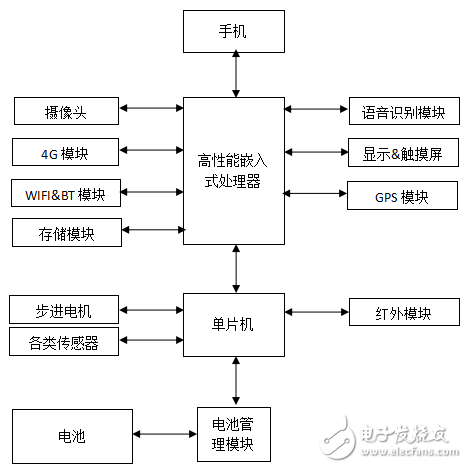
The core system of the robot runs on a high-performance embedded processor. The camera captures the video image and makes some simple judgments on the objects in the image, such as recognizing the face. The image acquisition of the static object can also allow the robot to identify the obstacle, or calculate the approximate geometric shape or even the size of the static object. The image capture of things, the robot can calculate the motion trajectory and even the speed of dynamic things. The 4G and WIFI&BT modules are wireless communication modules. With wireless communication robots, you can get more signals outside of yourself, and you can communicate your own information to others. The speech recognition module allows the robot to recognize the sound. The display & touch screen is just a way for the robot to interact with the outside world. The GPS module allows the robot to know its position information. The storage module not only stores the robot's system and various software, but also allows the robot to have The memory function, the camera mentioned above collects video images and calculates them. The calculation results can be stored in the storage module. When similar calculations are encountered, the things can be identified, and the information can be transmitted and shared through the network module. More robots. The single-chip microcomputer manages the various basic modules of the robot. The stepping motor controls the movement of the robot, and various types of sensors allow the robot to have the ability to sense the external environment. The infrared module allows for the manipulation of some external appliances, and the battery and battery management modules provide energy for the operation of the entire robot.
The hardware structure is the basis for realizing the operation and control of the service robot. The operating system running on the high-performance embedded processor carries out the specific operation and control of the service robot, which is equivalent to the soul of the robot. Currently, the three mainstream robot operating systems have Ubuntu, Android and ROS, Android software platform is widely used, ROS is a dedicated robot software platform. To realize the operation and control of the service robot, the software platform needs to solve the following problems:
1, distributed computing Modern robot systems often require multiple computers to run multiple processes at the same time. When multiple robots need to work together to complete a task, they often need to communicate with each other to support the completion of the task;
Users typically send commands to control robots via a desktop, laptop, or mobile device. This human-computer interaction interface can be considered part of the robot software.
2, software reuse With the rapid advancement of robot research, a number of algorithms for common tasks such as navigation, path planning, and mapping were born. Of course, the premise of any algorithm is that it can be applied to new areas without having to be repeated.
3. Rapid testing is more challenging for robot development software than other software developments, mainly because of the long preparation time for debugging and the complicated debugging process. Moreover, because of hardware maintenance, limited funding and other factors, robots are not always available.
As a software platform dedicated to robots, ROS can be run in ARM and Ubuntu environment. There are many optimizations and practicalities for the operation and control of service robots. The ROS software platform has the following advantages:
(1) Point-to-point design
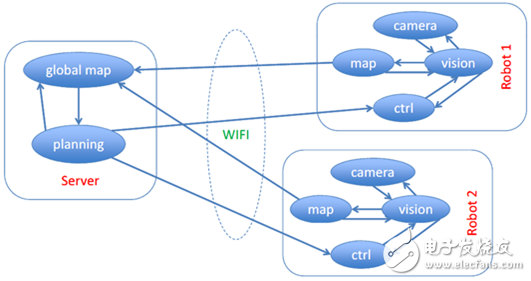
A system that uses ROS consists of a series of processes that exist on multiple different hosts and are linked through an end-to-end topology during operation. While the software framework based on the central server can also realize the advantages of multi-process and multi-host, in these frameworks, when the computers are connected through different networks, the central data server will have problems.
The peer-to-peer design of ROS and the mechanisms such as services and node managers can decentralize the real-time computational pressure brought by functions such as computer vision and speech recognition, and can adapt to the challenges faced by multiple robots.
(2) Multi-language support
When writing code, many programmers tend to prefer some programming languages. These preferences are the result of individual programming time in each language, debugging effects, grammar, execution efficiency, and various technical and cultural reasons. In order to solve these problems, we have designed ROS as a framework of language neutrality. ROS now supports many different languages, such as C++, Python, Octave, and LISP, as well as multiple interface implementations in other languages.
(3) streamlining and integration
Most existing robotics software projects include drivers and algorithms that can be reused outside of the project. Unfortunately, for many reasons, most of the code's middle tier is too confusing to extract it. Functionality, it is also difficult to extract them from the prototype and apply them to other aspects.
In response to this trend, we encourage the development of all drivers and algorithms into separate libraries that are not dependent on ROS. The system built by ROS has modular features, the code in each module can be compiled separately, and the CMake tool compiled and used makes it easy to implement the streamlined concept. ROS basically encapsulates complex code in the library, just creating a small application that functions as a ROS display library, allowing for the porting and reuse of simple code beyond prototypes. As a new addition, unit testing becomes very easy when the code is scattered in the library. A single test program can test many features in the library.
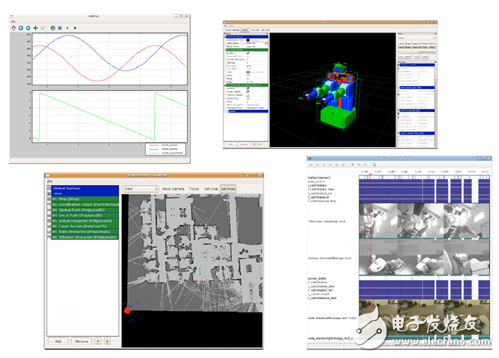
(4) Toolkit rich
In order to manage the complex ROS software framework, a large number of small tools are used to compile and run a variety of ROS components to design a kernel instead of building a large development and runtime environment.
(5) Free and open source
All source code for ROS is publicly available. We believe that this will definitely promote the debugging of all levels of ROS software and constantly correct errors. While non-open source software like Microsoft RoboTIcs Studio and Webots also has a lot of praiseworthy attributes, we believe that an open source platform is no substitute. This is especially true when the hardware and the software at all levels are designed and debugged at the same time.
At present, high-performance embedded processors are used more on mobile phone tablets. However, due to the development of the mobile phone industry, such processors are more traditional and fixed in interface, which is difficult to meet the design needs of robots. The high-performance embedded processor in the industrial direction is not too much. Freescale's imx series can be regarded as a good platform, mainly with rich interfaces and more customizable forms to meet the needs of robots' diversified interfaces. At the same time, the imx series has good support for Ubuntu and Android. The system runs stably on this platform. Ubuntu can support ROS software platform. The advantages of ROS software platform can solve some problems of the above-mentioned robot software development. . As a listed company specializing in the design and development of Freescale's imx platform, Chenhan Electronics has many years of experience and success stories in platform customization, and has stable shipments in the industrial robot market. The company also has pragmatic preparation in the service robot market. .
Galvanized aircraft cable
Main construction: 7x7 1/16" to 1/4"
7x19 3/32" to 3/8"
Surface: galvanized, PVC-coated, stainless, balck treated
Packing: 10000ft,5000ft,2500ft per reel or as per customer's request
galv. wire rope, GAC, MIL-83420,Steel Wire Rope,Galvanized Wire Rope,Galvanized Steel Wire Rope,Galvanized Aircraft Cable
ROYAL RANGE INTERNATIONAL TRADING CO., LTD , https://www.royalrangelgs.com